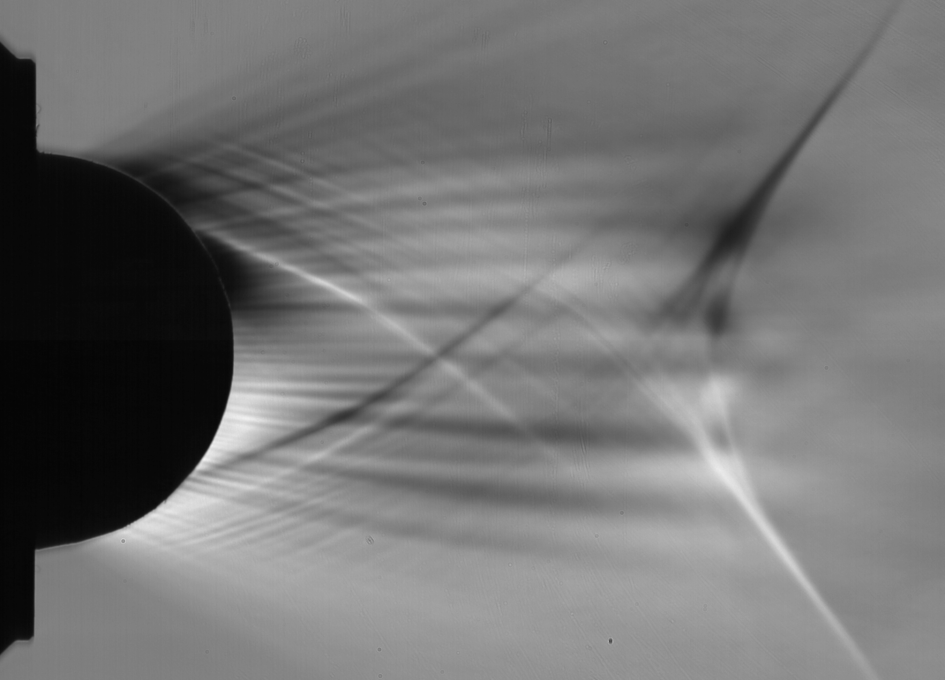
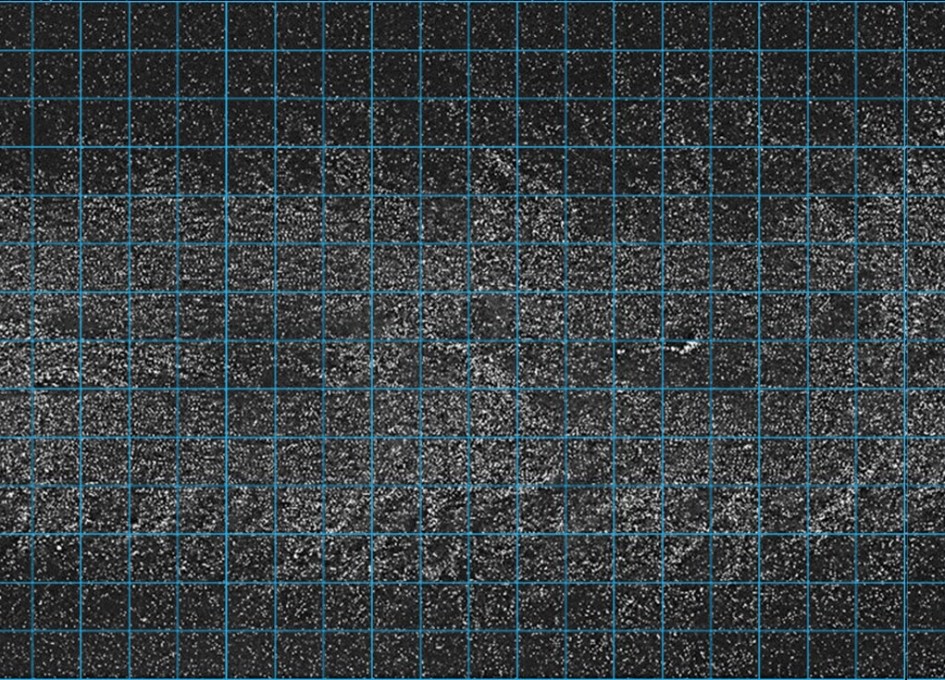
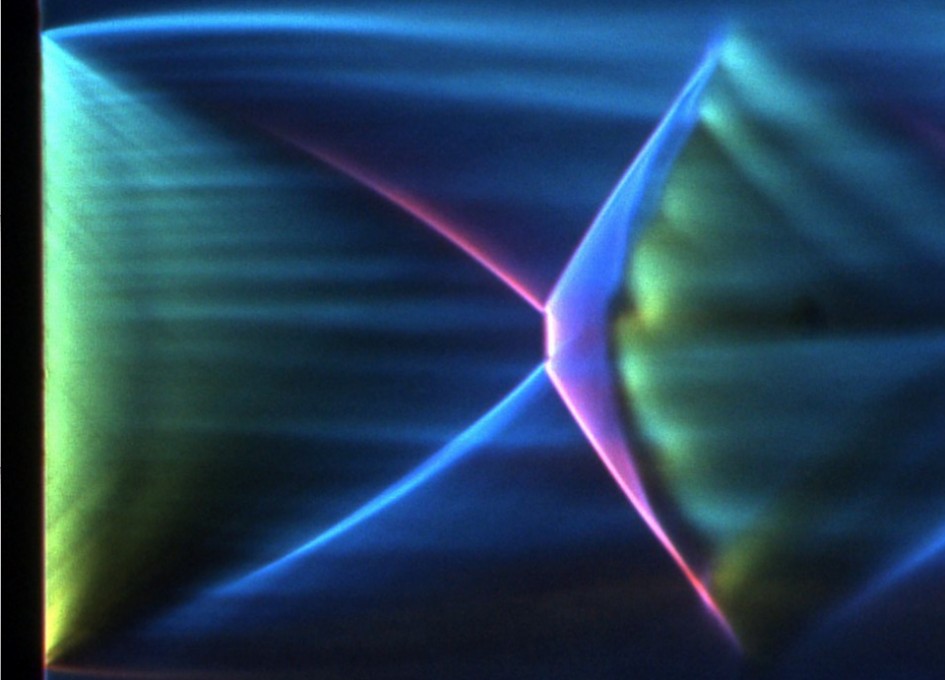
Research in compressible and multiphase fluid mechanics
About this site:
Welcome! This website is dedicated to my research in compressible and multi-phase fluid mechanics. If you'd like to see some of the projects I work on, or the talented students who are doing the work at the coal-face, check out the Research tab. If you want to learn more about how the research is done, or about fluid flow in general, try the "How it works" page. See Education & Outreach for some of my extracurricular work on science education, or visit the Gallery page to see the beautiful images of fluid flow we obtain in our laboratory.